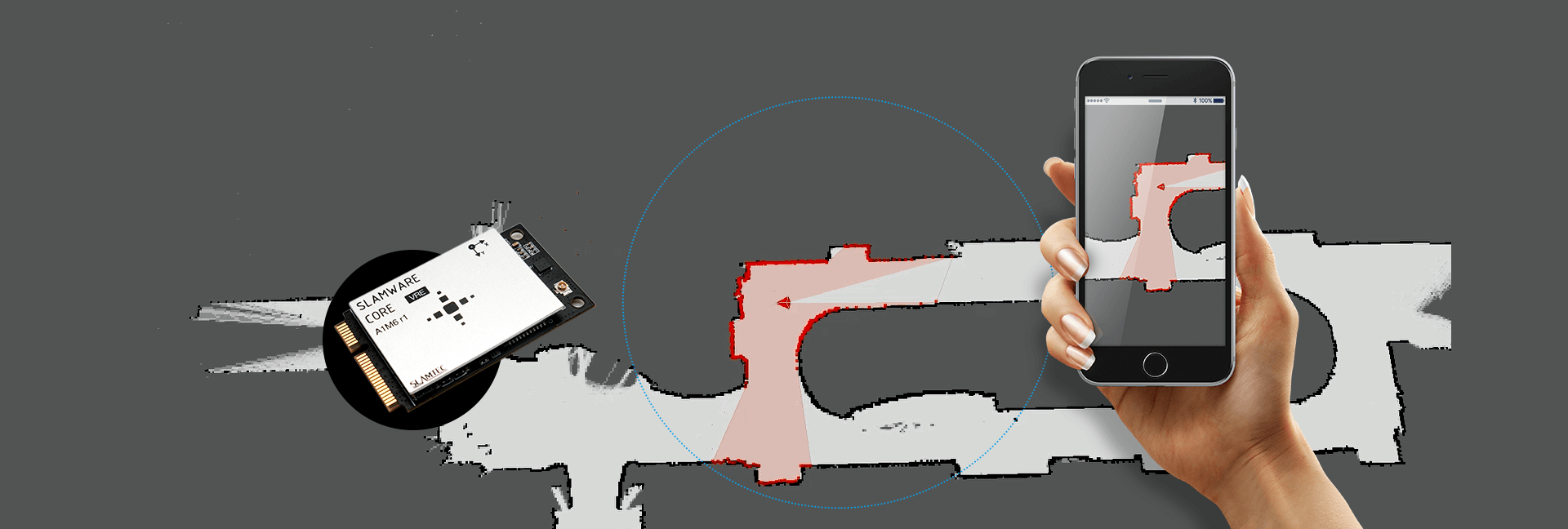


配套的机器人自主定位导航解决方案
RPLIDAR A2作为核心传感器,可快速获得环境轮廓信息,配合SLAMWARE使用,
可以帮助机器人实现自主构建地图、实时路径规划与自动避开障碍物。
高度集成,无需借助外部运算资源
直接输出机器人所在环境地图、定位坐标姿态
内置多种机器人运动控制算法
提供厘米级别的定位和地图精度
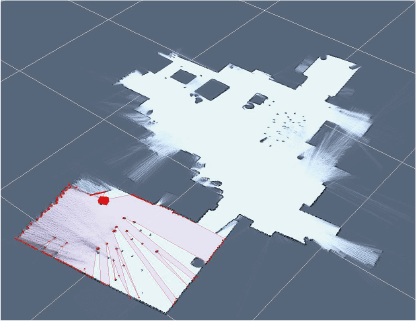
位置 / 地图同时获取
自主学习、无需人工干预
边定位、边建图
高精度,长时间不漂移
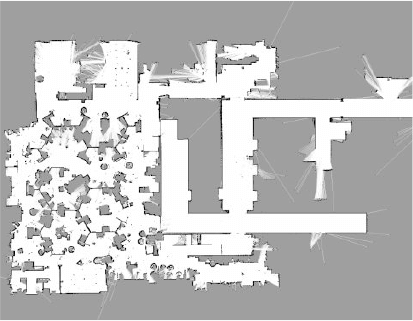
在未知环境中实时规划路径
并进行障碍物规避导航
动态路径规划
自主寻找最短路径
避开障碍物

ZEUS

SDP mini
Apollo


思岚科技官方微信





