 新手入门SLAM必备资料
新手入门SLAM必备资料
2018/9/17 02:37:14
搜集了各大网络,请教了SLAM大神,终于把SLAM的入门资料搜集全了!在分享资料前,我们先来看看,SLAM技术入门前需要具备哪些知识?首先学习SLAM需要会C和C++,网上很多代码还用了11标准的C++。第二要学会用Linux。第三要会cmake,vim/emacs及一些编程工具。第四要会用openCV, PCL, Eigen等第三方库。只有学会了这些东西,才能真正上手编一个SLAM系统。如果要跑实际机器人,还要会ROS。
SLAM究竟是什么?让你从0到1了解SLAM
2018/9/13 10:15:24
SLAM是Simultaneous localization and mapping缩写,意为“同步定位与建图”,主要用于解决机器人在未知环境运动时的定位与地图构建问题,为了让大家更多的了解SLAM,以下将从SLAM的应用领域、SLAM框架、SLAM分类(基于传感器的SLAM分类)来进行全面阐述,本文仅对没有接触过SLAM的新人进行的科普。

基于SLAMWARE,如何集成机器人通用底盘部分
2018/5/18 08:04:58

SLAMWARE ,机器人自主定位导航解决方案,内含核心算法模块SLAMWARE Core,可自行设计底盘主板,或直接集成,形成通用的机器人底层部分,帮助机器人实现室内定位导航功能。
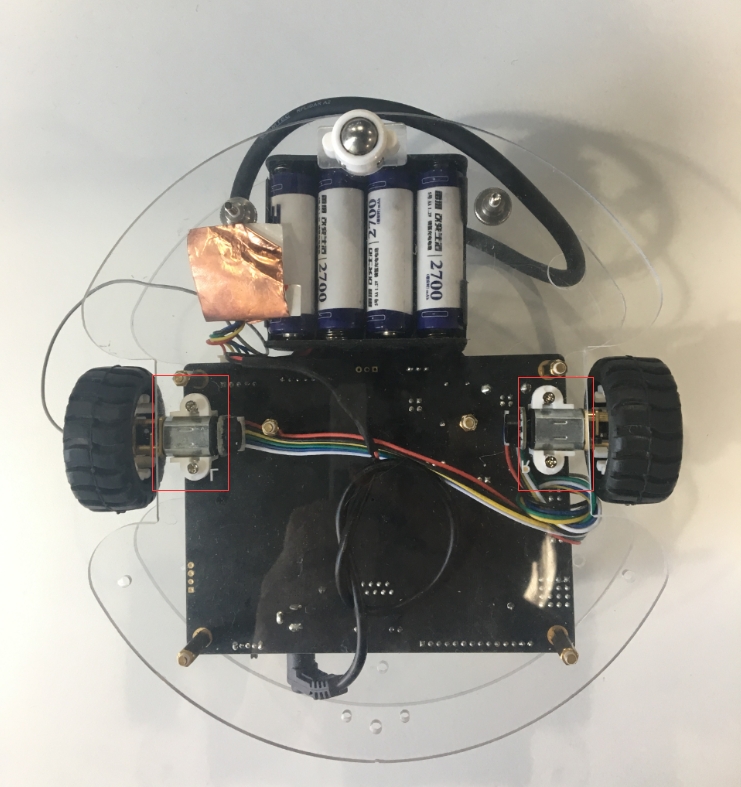
关于电机里程计,你还有这些不知道的事儿
2018/5/17 05:59:47
在思岚提供的自主定位导航解决方案中,主要是通过雷达和里程计的数据来进行定位。虽然激光雷达在一定范围之内会纠正里程计的误差,但在某些特殊环境下(如雷达扫描的有效点较少时),里程计的准备度还是会影响定位的效果。
简单6招,快速构建符合导航需求的地图
2018/4/17 03:42:56

地图作为机器人自主定位、避障、规划路线的依据之一,其重要程度不言而喻。
雷达作为建图的重要工具,在整个自主定位导航过程中充当着“眼睛”的角色,以思岚的RPLIDAR 建图作案例说明。

思岚科技官方微信






