 基于SLAMWARE的机器人底盘传感器安装指南
基于SLAMWARE的机器人底盘传感器安装指南
2018/12/13 03:03:28
机器人底盘中传感器安装不当,对机器人定位、建图及避障等会产生重要影响,基于slamware解决方案的机器人底盘常用传感器应该如何安装呢?以及安装中有什么需要注意的呢?本文将为大家一一阐述!
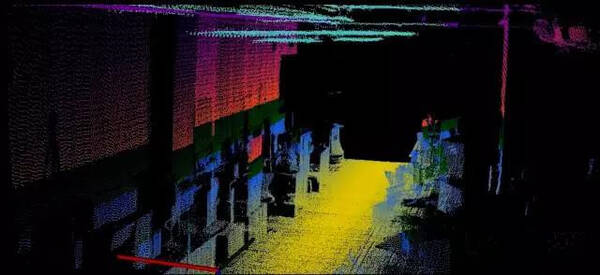
2D激光雷达如何实现3D应用?
2018/12/12 06:37:39
2D激光雷达除了实现定位、建图、多点触摸等应用外,还能用来做3D建模与环境扫描。肯定会有人好奇,2D激光雷达扫描出来的图像应该是平面图,怎么将2D平面图变为三维的立体图呢?
如何使用Robostudio加载地图?
2018/12/10 05:49:21
本文解释了关于加载地图的操作步骤,以及整个流程中需要注意的事项,比如,重定位是加载地图必不可少的一步,经常会被用户忽略。建议操作过程中,按照以下步骤进行。
如何使用思岚robostudio进行地图优化?
2018/12/7 02:31:38
当初用户在建图的过程可能会出现地图漂移,无法闭环,地图轮廓不清晰等问题。针对此问题大家可使用思岚自主研发的robostudio软件来进行地图优化,本文将基于robostudio的 map optimization 插件的地图优化方法进行详细解说。
如何构建一张满足机器人导航需求的地图?
2018/12/6 01:59:56
定位导航技术使机器人即使在无人操控的情况下,也可实现自主行走、避障及顺利到达目的地,机器人和人类绘制地图一样,在描述环境及认识环境的过程中都需要依靠地图,它主要利用地图类描述其当前环境信息,并随着使用的算法与传感器差异采用不同的地图描述形式,所以构建一张可靠的地图对机器人有着极其重要的作用,那如何构建满足机器人导航需求的地图呢?本文内容不可错过(主要针对采用思岚定位导航技术的用户)!


思岚科技官方微信






